自動駕駛技術正以前所未有的速度重塑交通產業的未來。在這一變革中,SOA(面向服務的架構)作為分布式系統的核心技術,為自動駕駛系統提供了高度模塊化、可擴展和靈活的服務框架。本文將從SOA的基本概念出發,深入探討其在自動駕駛領域的應用、技術實現、服務設計原則以及面臨的挑戰,幫助讀者全面理解這一架構如何驅動自動駕駛技術的發展。
一、SOA架構基礎及其在自動駕駛中的意義
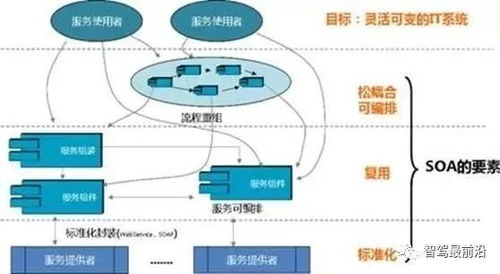
SOA是一種軟件設計方法,通過將系統功能分解為獨立、可復用的服務,實現松耦合的分布式系統。在自動駕駛場景中,SOA將復雜的感知、決策、控制等功能模塊化為服務,如感知服務、路徑規劃服務、車輛控制服務等。每個服務通過標準化接口(如REST、gRPC或DDS)進行通信,支持異步消息傳遞,從而提升系統的可靠性和實時性。
自動駕駛系統對實時性、安全性和可擴展性要求極高。SOA架構允許服務獨立部署和升級,例如,當感知算法需要優化時,只需更新感知服務而不影響其他模塊。分布式特性支持多傳感器融合和冗余設計,確保系統在部分故障時仍能安全運行。例如,特斯拉和Waymo等領先企業已采用類似架構,實現高效的OTA(空中下載)更新和功能迭代。
二、SOA在自動駕駛中的核心技術組件
- 服務定義與接口標準化:在SOA中,每個服務需明確定義其功能、輸入輸出參數及通信協議。自動駕駛系統常用DDS(數據分發服務)或ROS 2(機器人操作系統)作為中間件,提供低延遲、高可靠的消息傳遞。例如,感知服務可輸出目標檢測數據,規劃服務據此生成路徑指令。
- 服務發現與治理:分布式環境下,服務需動態注冊和發現。通過Consul或Kubernetes等服務網格工具,系統能自動管理服務生命周期,實現負載均衡和容錯。在自動駕駛中,這確保了關鍵服務(如緊急制動)的高可用性。
- 數據管理與通信:SOA強調數據共享與事件驅動。自動駕駛系統利用消息隊列(如Apache Kafka)處理海量傳感器數據,支持異步處理。例如,攝像頭和激光雷達數據可通過事件總線分發到多個服務,實現高效融合。
- 安全與實時性保障:SOA需集成安全機制,如服務間認證、加密通信和故障隔離。自動駕駛系統通過時間敏感網絡(TSN)和冗余設計,滿足毫秒級響應要求,確保行車安全。
三、SOA服務設計原則與最佳實踐
- 松耦合與高內聚:每個服務應專注于單一功能,減少依賴。例如,將定位服務與地圖服務分離,便于獨立優化。
- 可擴展性與彈性:采用微服務模式,支持水平擴展。在自動駕駛中,當數據處理需求增加時,可動態擴展感知服務實例。
- 容錯與監控:通過健康檢查和熔斷機制(如Hystrix),防止服務級聯故障。集成日志和指標系統(如Prometheus),實現實時監控。
四、挑戰與未來展望
盡管SOA為自動駕駛帶來諸多優勢,但也面臨挑戰:服務間通信延遲可能影響實時決策;系統復雜性增加調試難度;安全漏洞需持續防護。隨著5G和邊緣計算的發展,SOA將與AI深度融合,支持更智能的自動駕駛服務。例如,通過聯邦學習,車輛可共享模型更新而不暴露原始數據,進一步提升系統智能化水平。
SOA架構是自動駕駛技術革新的基石,它通過分布式服務化設計,實現了系統的高效、可靠和可演進。隨著標準化的推進和技術的成熟,SOA必將在自動駕駛產業化中發揮更重要的作用。









